Precision Servo DC Motor 46S/12V-8A1

Mga pangunahing tampok ng servo DC motor: (iba pang mga modelo, maaaring ipasadya ang pagganap)
| 1. Rated boltahe: | DC 12V | 5.Na-rate na bilis: | ≥ 2600 rpm |
| 2. Saklaw ng boltahe sa pagpapatakbo: | DC 7.4V-13V | 6. Hinaharang ang kasalukuyang: | ≤2.5A |
| 3. Rated na kapangyarihan: | 25W | 7. Mag-load ng kasalukuyang: | ≥1A |
| 4. Direksyon ng pag-ikot: | Ang CW output shaft ay nasa itaas | 8.Shaft clearance: | ≤1.0mm |
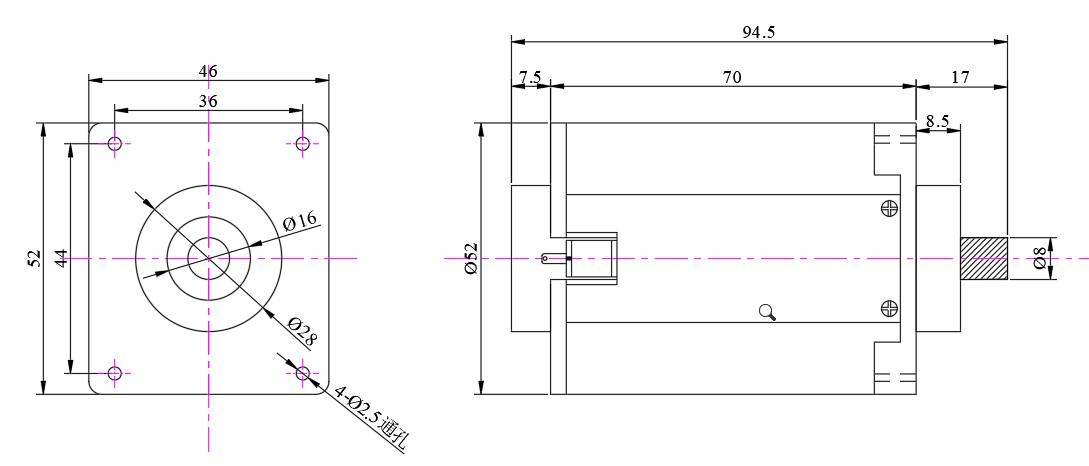
Diagram ng hitsura ng produkto
Oras ng pag-expire
Mula sa petsa ng paggawa, ang ligtas na panahon ng paggamit ng produkto ay 10 taon, at ang patuloy na oras ng pagtatrabaho ay ≥ 2000 na oras.
Mga tampok ng produkto
1.Compact, space-saving na disenyo;
2.Ball bearing structure;
3. Mahabang buhay ng serbisyo ng brush;
4. Ang panlabas na pag-access sa mga brush ay nagbibigay-daan sa madaling pagpapalit upang higit pang pahabain ang buhay ng motor;
5. Mataas na panimulang metalikang kuwintas;
6.Dynamic na pagpepreno upang huminto nang mas mabilis;
7. Nababaligtad na pag-ikot;
8.Simple na two-wire connection;
9. Class F pagkakabukod, mataas na temperatura welding commutator.
10. Sa mababang ingay at matatag na operasyon, ito ay lalong angkop para sa mga okasyong nangangailangan ng mataas na bilis at mababang ingay.
Mga aplikasyon
Ito ay malawakang ginagamit sa mga larangan ng matalinong tahanan, tumpak na mga medikal na aparato, pagmamaneho ng sasakyan, mga produkto ng consumer electronics, kagamitan sa masahe at pangangalagang pangkalusugan, mga tool sa personal na pangangalaga, intelligent na robot transmission, industriyal na automation, awtomatikong mekanikal na kagamitan, mga digital na produkto, atbp.
Ilustrasyon ng pagganap



Ano ang mga katangian ng DC servo motor
Sa isang DC servo motor mayroong isang direktang kasalukuyang (DC) na may positibo at negatibong mga terminal. Sa pagitan ng bawat isa sa mga terminal na ito, ang kasalukuyang daloy sa eksaktong parehong direksyon. Ang inertia ng servo motor ay dapat na mas maliit para sa katumpakan at katumpakan. Ang DC servos ay may mabilis na tugon, na nakakamit sa pamamagitan ng pagpapanatili ng mataas na torque-to-weight ratio. Bilang karagdagan, ang katangian ng bilis ng DC servo ay dapat na linear.
Sa isang DC servo motor, ang kasalukuyang kontrol ay mas simple kaysa sa isang AC servo motor dahil ang tanging kinakailangan sa kontrol ay ang kasalukuyang armature magnitude. Ang bilis ng motor ay kinokontrol ng duty cycle na kinokontrol na pulse width modulation (PWM). Ginagamit ang control flux upang pamahalaan ang torque, na nagreresulta sa maaasahang pagkakapare-pareho sa bawat cycle ng aktibidad.
Ang DC servo motors ay may posibilidad na magkaroon ng mas malaking inertia kaysa sa squirrel-cage AC motors. Ito at ang pagtaas ng paglaban sa frictional ng brush ay ang pangunahing mga kadahilanan na pumipigil sa kanilang paggamit sa mga servos ng instrumento. Sa maliliit na sukat, ang mga DC servo motor ay pangunahing ginagamit sa mga sistema ng kontrol ng sasakyang panghimpapawid kung saan ang mga hadlang sa bigat at espasyo ay nangangailangan ng motor na maghatid ng pinakamataas na lakas sa bawat dami ng yunit. Karaniwang ginagamit ang mga ito para sa pasulput-sulpot na tungkulin o kung saan kinakailangan ang hindi pangkaraniwang mataas na panimulang torque. Ang DC servo motors ay maaari ding gamitin sa mga electromechanical actuator, process controllers, programming equipment, industrial automation robots, CNC machine tool equipment, at marami pang ibang application na may katulad na katangian.
Ang DC servo motor ay isang pagpupulong na binubuo ng apat na pangunahing bahagi, katulad ng isang DC motor, isang position sensing device, isang gear assembly, at isang control circuit. Ang kinakailangang bilis ng isang DC motor ay depende sa boltahe na inilapat. Upang kontrolin ang bilis ng motor, ang potentiometer ay gumagawa ng boltahe na inilalapat sa isa sa mga input ng error amplifier.







